This is my undergraduate final year research project topic, where my partner and I designed a novel screwdriving actuator system to attach to a fully-actuated octorotor UAV, and investigated the dynamics of this new UAV configuration. More details on our project can be seen under the project called ‘Fully-Actuated Screwdriving Unmanned Aerial Vehicle‘ on the DTRG research group website here.
To share our results with a wider audience, we wrote a conference paper documenting our design and findings called ‘Actuator Modelling for a Fully-Actuated Screwdriving UAV‘, for the 2024 Australasian Conference on Robotics and Automation (ACRA 2024, link to conference here and proceedings here), which I presented in.
I also wrote and published another conference paper on further analyses into case studies involving this unique UAV configuration called ‘Performance Analysis of a Fully-Actuated
Screwdriving UAV‘, for the 2025 International Conference on Unmanned Aircraft Systems (ICUAS 2025, link to conference here and proceedings coming soon).

Image of the fully-actuated screwdriving UAV
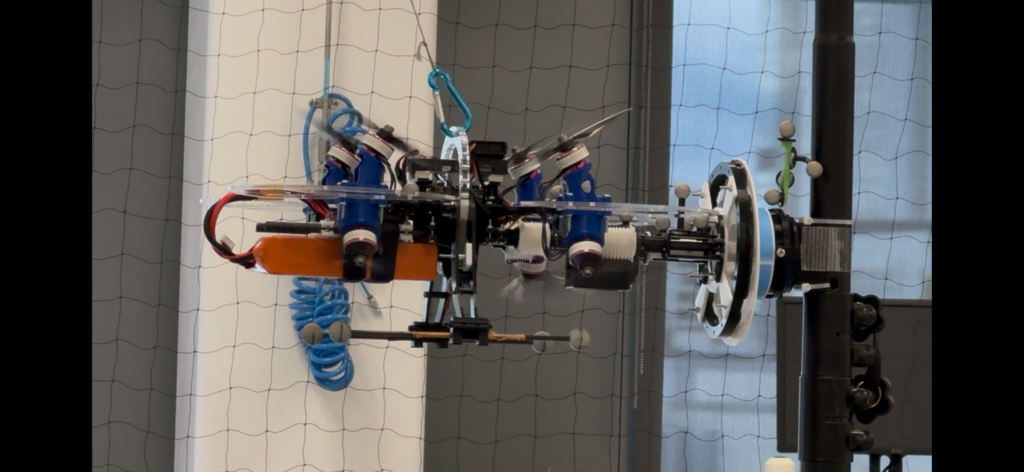
UAV performing screwdriving operation